 file
file- go-internals
- Go-Questions
- golang101
- golangbot
- gomod-conflict-detect
- html2md
- images
- img
- istio源码分析
- Jaeger源码分析
- nsq源码分析
- watermelo
- 源码分析
 awesome.md
awesome.md- bugs.md
- build-a-installsuffix.md
- cgo.md
- client-go.md
- context.md
- CPU-cache.md
- CPU性能内存分析调试方法大汇总.md
- defer.md
- DNS.md
- enum.md
- error.md
- float.md
- GC-1.md
- GC-20-Questions.md
- Go 编译器内核-给 Go 新增一个语句.md
- go-build-version.md
- go-compile.md
- go-http2.md
- go-mem.md
- go-memory-allocator-visual-guide.md
- go-memory-management.md
- go-mod.md
- go-raft.md
- go-virtual-memory-alloc.md
- go1.15.md
- go2.md
- gocker-docker.md
- GOMAXPROCS.md
- goroutine-channel.md
- Go内存分配器的设计与实现.md
- Go内存详解.md
- go指令.md
- go语言原本.md
- http.md
- ipv6v4.md
- k8s-client-1.md
- LeetCode.md
- map.md
- mem-malloc-2.md
- mem-malloc.md
- pprof.md
- readelf-objdump.md
- README.md
- Real-world-advice-for-writing-maintainable-Go-programs.md
- release.md
- scheduler.md
- slice.md
- socket.md
- tostudy.md
- unsafe.md
- version.md
- 加权随机.md
- 存储开源项目.md
- 性能.md
- 指针-结构体.md
Table of Contents
[TOC]
golang内存分配
Go语言内置运行时(就是runtime),不同于传统的内存分配方式,go为自主管理,最开始是基于tcmalloc架构,后面逐步迭新。自主管理可实现更好的内存使用模式,如内存池、预分配等,从而避免了系统调用所带来的性能问题。
1. 基本策略
- 每次从操作系统申请一大块内存,然后将其按特定大小分成小块,构成链表(组织方式是一个单链表数组,数组的每个元素是一个单链表,链表中的每个元素具有相同的大小。);
- 为对象分配内存时从大小合适的链表提取一小块,避免每次都向操作系统申请内存,减少系统调用。
- 回收对象内存时将该小块重新归还到原链表,以便复用;若闲置内存过多,则归还部分内存到操作系统,降低整体开销。
1.1 内存块
span:即上面所说的操作系统分配的大块内存,由多个地址连续的页组成;
object:由span按特定大小切分的小块内存,每一个可存储一个对象;
按照用途,span面向内部管理,object面向对象分配。
关于span
内存分配器按照页数来区分不同大小的span,如以页数为单位将span存放到管理数组中,且以页数作为索引;
span大小并非不变,在没有获取到合适大小的闲置span时,返回页数更多的span,然后进行剪裁,多余的页数构成新的span,放回管理数组;
分配器还可以将相邻的空闲span合并,以构建更大的内存块,减少碎片提供更灵活的分配策略。
分配的内存块大小
在$GOROOT/src/runtime/malloc.go文件下可以找到相关信息。
//malloc.go
_PageShift = 13
_PageSize = 1<< _PageShift //8KB
用于存储对象的object,按8字节倍数分为n种。如,大小为24的object可存储范围在17~24字节的对象。在造成一些内存浪费的同时减少了小块内存的规格,优化了分配和复用的管理策略。
分配器还会将多个微小对象组合到一个object块内,以节约内存。
//malloc.go
_NumSizeClasses = 67
//mheap.go
type mspan struct {
next *mspan //双向链表 next span in list, or nil if none
prev *mspan //previous span in list, or nil if none
list *mSpanList //用于调试。TODO: Remove.
//起始序号 = (address >> _PageShift)
startAddr uintptr //address of first byte of span aka s.base()
npages uintptr //number of pages in span
//待分配的object链表
manualFreeList gclinkptr //list of free objects in mSpanManual spans
}
分配器初始化时,会构建对照表存储大小和规格的对应关系,包括用来切分的span页数。
//msize.go
// Malloc small size classes.
//
// See malloc.go for overview.
// See also mksizeclasses.go for how we decide what size classes to use.
package runtime
// 如果需要,返回mallocgc将分配的内存块的大小。
func roundupsize(size uintptr) uintptr {
if size < _MaxSmallSize {
if size <= smallSizeMax-8 {
return uintptr(class_to_size[size_to_class8[(size+smallSizeDiv-1)/smallSizeDiv]])
} else {
return uintptr(class_to_size[size_to_class128[(size-smallSizeMax+largeSizeDiv-1)/largeSizeDiv]])
}
}
if size+_PageSize < size {
return size
}
return round(size, _PageSize)
}
如果对象大小超出特定阈值限制,会被当做大对象(large object)特别对待。
//malloc.go
_MaxSmallSize = 32 << 10 //32KB
这里的对象分类:
- 小对象(tiny): size < 16byte;
- 普通对象: 16byte ~ 32K;
- 大对象(large):size > 32K;
1.2 内存分配器
分配器分为三个模块
cache:每个运行期工作线程都会绑定一个cache,用于无锁object分配(Central组件其实也是一个缓存,但它缓存的不是小对象内存块,而是一组一组的内存page(一个page占4k大小))。
//mcache.go
type mcache struct{
以spanClass为索引管理多个用于分配的span
alloc [numSpanClasses]*mspan // spans to allocate from, indexed by spanClass
}
central:为所有cache提供切分好的后备span资源。
//mcentral.go
type mcentral struct{
spanclass spanClass //规格
//链表:尚有空闲object的span
nonempty mSpanList // list of spans with a free object, ie a nonempty free list
// 链表:没有空闲object,或已被cache取走的span
empty mSpanList // list of spans with no free objects (or cached in an mcache)
}
heap:管理闲置span,需要时间向操作系统申请新内存(堆分配器,以8192byte页进行管理)。
type mheap struct{
largealloc uint64 // bytes allocated for large objects
//页数大于127(>=127)的闲置span链表
largefree uint64 // bytes freed for large objects (>maxsmallsize)
nlargefree uint64 // number of frees for large objects (>maxsmallsize)
//页数在127以内的闲置span链表数组
nsmallfree [_NumSizeClasses]uint64 // number of frees for small objects (<=maxsmallsize)
//每个central对应一种sizeclass
central [numSpanClasses]struct {
mcentral mcentral
pad [cpu.CacheLinePadSize - unsafe.Sizeof(mcentral{})%cpu.CacheLinePadSize]byte
}
一个线程有一个cache对应,这个cache用来存放小对象。所有线程共享Central和Heap。
虚拟地址空间
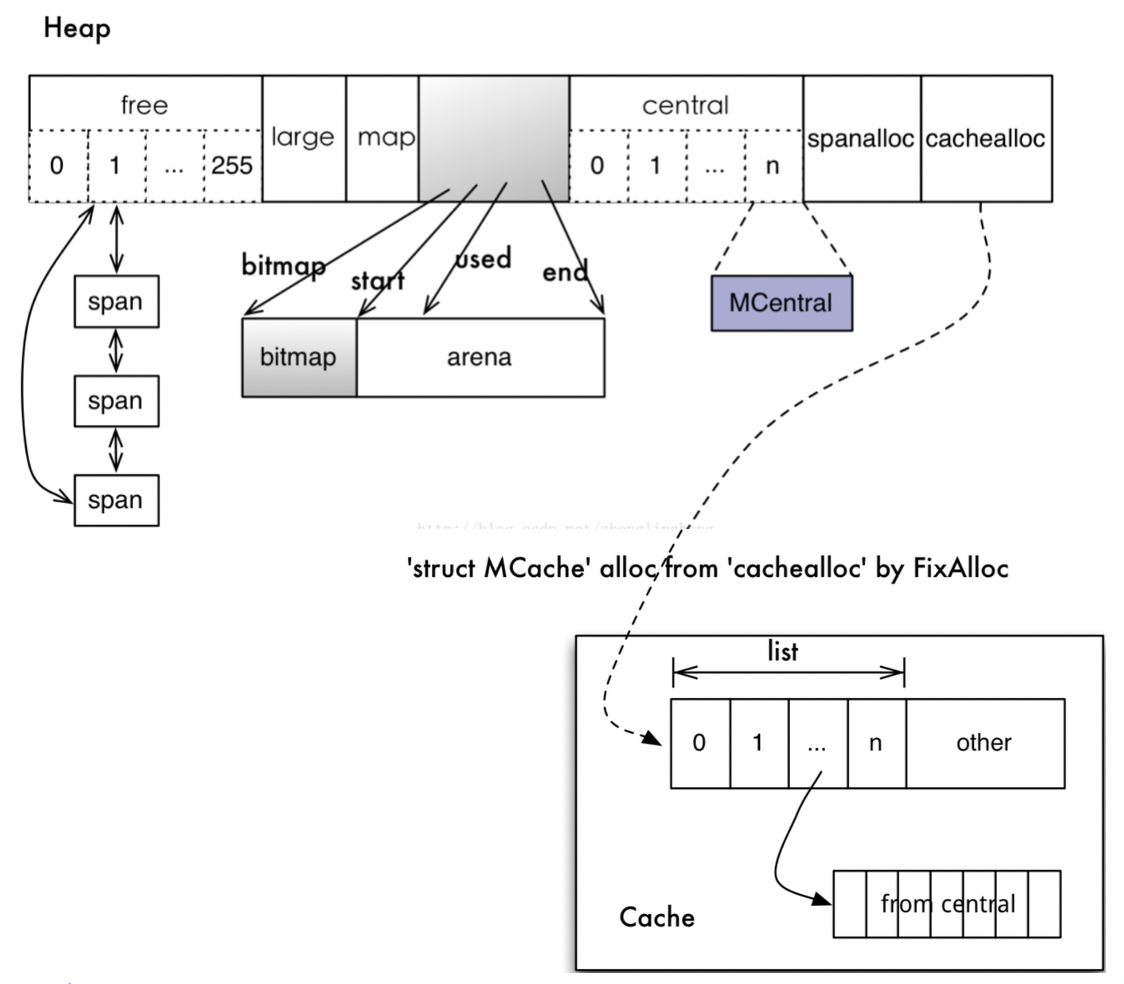
内存分配和垃圾回收都依赖连续地址,所以系统预留虚拟地址空间,用于内存分配,申请内存时,系统承诺但不立即分配物理内存。虚拟地址分成三个区域:
- 页所属span指针数组 spans 512MB spans_mapped
- GC标记位图 bitmap 32GB bit_map
- 用户内存分配区域 arena 512GB arena_start arena_used arena_end
三个数组组成一个高性能内存管理结构。使用arena地址向操作系统申请内存,其大小决定了可分配用户内存上限;bitmap为每个对象提供4bit 标记位,用以保存指针、GC标记等信息;创建span时,按页填充对应spans空间。这些区域的相关属性保存在heap里,其中包括递进的分配位置mapped/used。
各个模块关系图如下:
1.3 内存分配流程
从对象的角度:
1、计算待分配对象规格大小(size class);
2、cache.alloc数组中找到对应规格的apan;
3、span.freelist提取可用object,若该span.freelist为空从central获取新sapn;
4、若central.nonempty为空,从heap.free/freelarge获取,并切分成object 链表;
5、如heap没有大小合适的闲置span,向操作系统申请新内存块。
释放流程:
1、将标记为可回收的object交还给所属span.freelist;
2、该span被放回central,可供任意cache重新获取使用;
3、如span已回收全部object,则将其交还给heap,以便重新切分复用;
4、定期扫描heap里长期闲置的span,释放其占用内存。
(注:以上不包括大对象,它直接从heap分配和回收)
cache为每个工作线程私有且不被共享,是实现高性能无锁分配内存的核心。central是在多个cache中提高object的利用率,避免浪费。回收操作将span交还给central后,该span可被其他cache重新获取使用。将span归还给heap是为了在不同规格object间平衡。
2. 内存分配器初始化
初始化流程:
func mallocinit() {
testdefersizes()
if heapArenaBitmapBytes&(heapArenaBitmapBytes-1) != 0 {
// heapBits需要位图上的模块化算法工作地址。
throw("heapArenaBitmapBytes not a power of 2")
}
// //复制类大小以用于统计信息表。
for i := range class_to_size {
memstats.by_size[i].size = uint32(class_to_size[i])
}
// 检查 physPageSize.
if physPageSize == 0 {
// 操作系统初始化代码无法获取物理页面大小。
throw("failed to get system page size")
}
if physPageSize < minPhysPageSize {
print("system page size (", physPageSize, ") is smaller than minimum page size (", minPhysPageSize, ")\n")
throw("bad system page size")
}
if physPageSize&(physPageSize-1) != 0 {
print("system page size (", physPageSize, ") must be a power of 2\n")
throw("bad system page size")
}
// 初始化堆。
mheap_.init()
//为当前对象绑定cache对象
_g_ := getg()
_g_.m.mcache = allocmcache()
//创建初始 arena 增长提示。
if sys.PtrSize == 8 && GOARCH != "wasm" {
//在64位计算机上:
// 1.从地址空间的中间开始,可以轻松扩展到连续范围,而无需运行其他映射。
//
// 2.这使Go堆地址调试时更容易识别。
//
// 3. gccgo中的堆栈扫描仍然很保守,因此将地址与其他数据区分开很重要。
//
//在AIX上,对于64位,mmaps从0x0A00000000000000开始设置保留地址,如果失败,则尝试0x1c00000000000000~0x7fc0000000000000。
// 流程.
for i := 0x7f; i >= 0; i-- {
var p uintptr
switch {
case GOARCH == "arm64" && GOOS == "darwin":
p = uintptr(i)<<40 | uintptrMask&(0x0013<<28)
case GOARCH == "arm64":
p = uintptr(i)<<40 | uintptrMask&(0x0040<<32)
case GOOS == "aix":
if i == 0 {
//我们不会直接在0x0A00000000000000之后使用地址,以避免与非执行程序所完成的其他mmap发生冲突。
continue
}
p = uintptr(i)<<40 | uintptrMask&(0xa0<<52)
case raceenabled:
// TSAN运行时要求堆的范围为[0x00c000000000,0x00e000000000)。
p = uintptr(i)<<32 | uintptrMask&(0x00c0<<32)
if p >= uintptrMask&0x00e000000000 {
continue
}
default:
p = uintptr(i)<<40 | uintptrMask&(0x00c0<<32)
}
hint := (*arenaHint)(mheap_.arenaHintAlloc.alloc())
hint.addr = p
hint.next, mheap_.arenaHints = mheap_.arenaHints, hint
}
} else {
//在32位计算机上,需要更加关注保持可用堆是连续的。
//
// 1.我们为所有的heapArenas保留空间,这样它们就不会与heap交错。它们约为258MB。
//
// 2. 我们建议堆从二进制文件的末尾开始,因此我们有最大的机会保持其连续性。
//
// 3. 我们尝试放出一个相当大的初始堆保留。
const arenaMetaSize = (1 << arenaBits) * unsafe.Sizeof(heapArena{})
meta := uintptr(sysReserve(nil, arenaMetaSize))
if meta != 0 {
mheap_.heapArenaAlloc.init(meta, arenaMetaSize)
}
procBrk := sbrk0()
p := firstmoduledata.end
if p < procBrk {
p = procBrk
}
if mheap_.heapArenaAlloc.next <= p && p < mheap_.heapArenaAlloc.end {
p = mheap_.heapArenaAlloc.end
}
p = round(p+(256<<10), heapArenaBytes)
// // 因为我们担心32位上的碎片,所以我们尝试进行较大的初始保留。
arenaSizes := []uintptr{
512 << 20,
256 << 20,
128 << 20,
}
for _, arenaSize := range arenaSizes {
a, size := sysReserveAligned(unsafe.Pointer(p), arenaSize, heapArenaBytes)
if a != nil {
mheap_.arena.init(uintptr(a), size)
p = uintptr(a) + size // For hint below
break
}
}
hint := (*arenaHint)(mheap_.arenaHintAlloc.alloc())
hint.addr = p
hint.next, mheap_.arenaHints = mheap_.arenaHints, hint
}
}
大概流程:
1、创建对象规格大小对照表;
2、计算相关区域大小,并尝试从某个指定位置开始保留地址空间;
3、在heap里保存区域信息,包括起始位置和大小;
4、初始化heap其他属性。
看一下保留地址操作细节:
//mem_linux.go
func sysReserve(v unsafe.Pointer, n uintptr) unsafe.Pointer {
p, err := mmap(v, n, _PROT_NONE, _MAP_ANON|_MAP_PRIVATE, -1, 0) //PORT_NONE: 页面无法访问;
if err != 0 {
return nil
}
return p
}
func sysMap(v unsafe.Pointer, n uintptr, sysStat *uint64) {
mSysStatInc(sysStat, n)
p, err := mmap(v, n, _PROT_READ|_PROT_WRITE, _MAP_ANON|_MAP_FIXED|_MAP_PRIVATE, -1, 0) //_MAP_FIXED: 必须使用指定起始位置
if err == _ENOMEM {
throw("runtime: out of memory")
}
if p != v || err != 0 {
throw("runtime: cannot map pages in arena address space")
}
}
函数mmap()要求操作系统内核创建新的虚拟存储器区域,可指定起始位置和长度。
3. 内存分配
编译器有责任尽可能使用寄存器和栈来存储对象,有助于提升性能,减少垃圾回收器的压力。
以new函数为例看一下内存分配
//test.go
package main
import ()
func test() *int {
x :=new(int)
*x = 0xAABB
return x
}
func main(){
println(*test())
}
在默认有内联优化的时候:
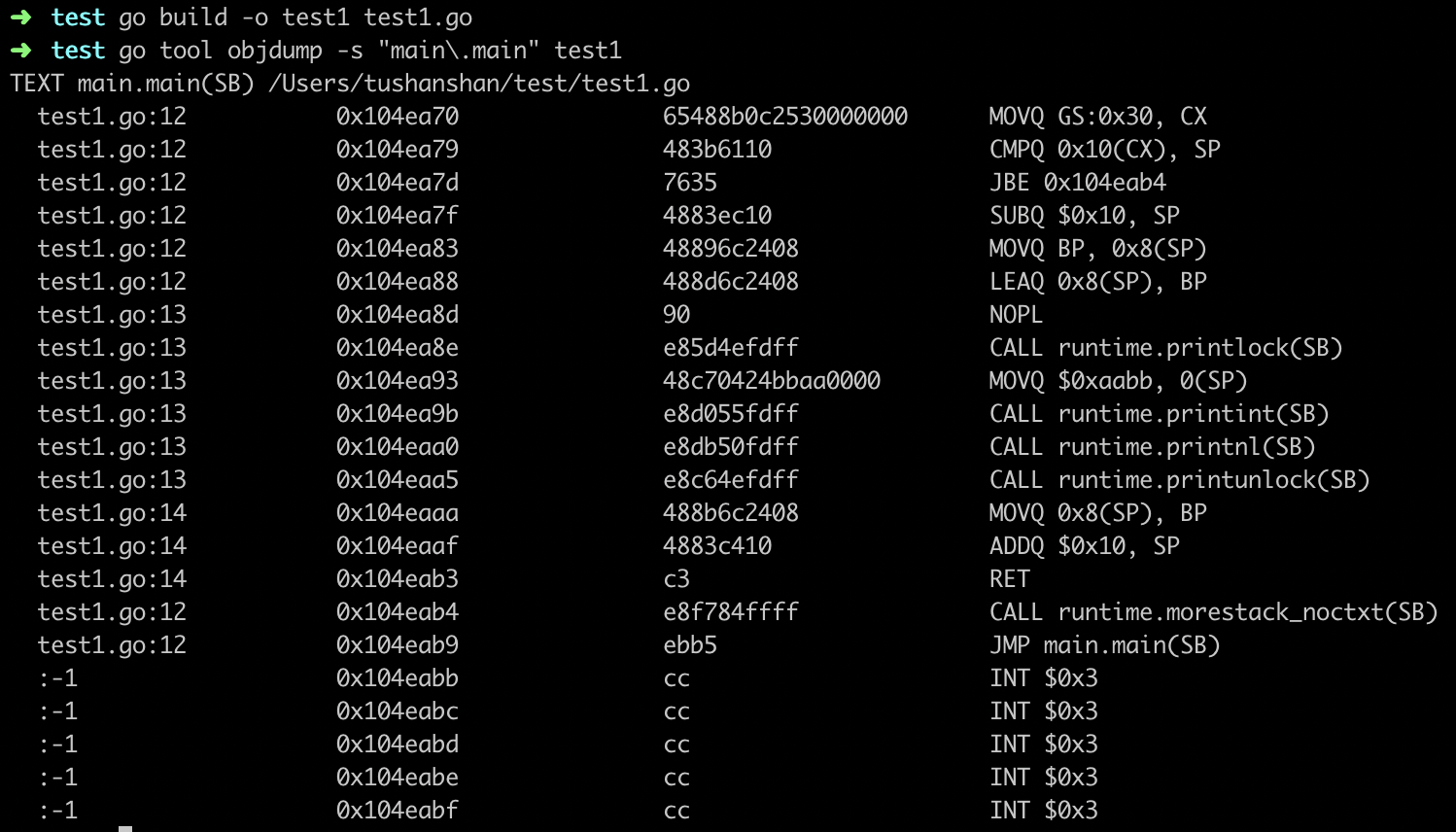
内联优化是避免栈和抢占检查这些成本的经典优化方法。
在没有内联优化的时候new函数会调用newobject在堆上分配内存。要在两个栈帧间传递对象,因此会在堆上分配而不是返回一个失效栈帧里的数据。而当内联后它实际上就成了main栈帧内的局部变量,无须去堆上操作。
GO语言支持逃逸分析(eseape, analysis), 它会在编译期通过构建调用图来分析局部变量是否会被外部调用,从而决定是否可以直接分配在栈上。
编译参数-gcflags "-m" 可输出编译优化信息,其中包括内联和逃逸分析。性能测试时使用go-test-benchemem参数可以输出堆分配次数统计。
3.1 newobject分配内存的过程
//mcache.go
//小对象的线程(按Go,按P)缓存。 不需要锁定,因为它是每个线程的(每个P)。 mcache是从非GC的内存中分配的,因此任何堆指针都必须进行特殊处理。
//go:not in heap
type mcache struct {
...
// Allocator cache for tiny objects w/o pointers.See "Tiny allocator" comm ent in malloc.go.
// tiny指向当前微小块的开头,如果没有当前微小块,则为nil。
//
// tiny是一个堆指针。 由于mcache位于非GC的内存中,因此我们通过在标记终止期间在releaseAll中将其清除来对其进行处理。
tiny uintptr
tinyoffset uintptr
local_tinyallocs uintptr // 未计入其他统计信息的微小分配数
// 其余的不是在每个malloc上访问的。
alloc [numSpanClasses]*mspan // 要分配的范围,由spanClass索引
}
内置new函数的实现
//malloc.go
// implementation of new builtin
// compiler (both frontend and SSA backend) knows the signature
// of this function
func newobject(typ *_type) unsafe.Pointer {
return mallocgc(typ.size, typ, true)
}
// Allocate an object of size bytes.
// Small objects are allocated from the per-P cache's free lists.
// Large objects (> 32 kB) are allocated straight from the heap.
///分配一个大小为字节的对象。小对象是从per-P缓存的空闲列表中分配的。 大对象(> 32 kB)直接从堆中分配。
func mallocgc(size uintptr, typ *_type, needzero bool) unsafe.Pointer {
if gcphase == _GCmarktermination { //垃圾回收有关
throw("mallocgc called with gcphase == _GCmarktermination")
}
if size == 0 {
return unsafe.Pointer(&zerobase)
}
if debug.sbrk != 0 {
align := uintptr(16)
if typ != nil {
align = uintptr(typ.align)
}
return persistentalloc(size, align, &memstats.other_sys) //围绕sysAlloc的包装程序,可以分配小块。没有相关的自由操作。用于功能/类型/调试相关的持久数据。如果align为0,则使用默认的align(当前为8)。返回的内存将被清零。考虑将持久分配的类型标记为go:notinheap。
}
// assistG是要为此分配收费的G,如果GC当前未激活,则为n。
var assistG *g
...
// Set mp.mallocing to keep from being preempted by GC.
//加锁放防止GC被抢占。
mp := acquirem()
if mp.mallocing != 0 {
throw("malloc deadlock")
}
if mp.gsignal == getg() {
throw("malloc during signal")
}
mp.mallocing = 1
shouldhelpgc := false
dataSize := size
//当前线程所绑定的cache
c := gomcache()
var x unsafe.Pointer
// 判断分配的对象是否 是nil或非指针类型
noscan := typ == nil || typ.kind&kindNoPointers != 0
//微小对象
if size <= maxSmallSize {
//无须扫描非指针微小对象(16)
if noscan && size < maxTinySize {
// Tiny allocator.
//微小的分配器将几个微小的分配请求组合到一个内存块中。当所有子对象均不可访问时,将释放结果存储块。子对象必须是noscan(没有指针),以确保限制可能浪费的内存量。
//用于合并的存储块的大小(maxTinySize)是可调的。当前设置为16字节.
//小分配器的主要目标是小字符串和独立的转义变量。在json基准上,分配器将分配数量减少了约12%,并将堆大小减少了约20%。
off := c.tinyoffset
// 对齐所需(保守)对齐的小指针。调整偏移量。
if size&7 == 0 {
off = round(off, 8)
} else if size&3 == 0 {
off = round(off, 4)
} else if size&1 == 0 {
off = round(off, 2)
}
//如果剩余空间足够. 当前mcache上绑定的tiny 块内存空间足够,直接分配,并返回
if off+size <= maxTinySize && c.tiny != 0 {
// 返回指针,调整偏移量为下次分配做好准备。
x = unsafe.Pointer(c.tiny + off)
c.tinyoffset = off + size
c.local_tinyallocs++
mp.mallocing = 0
releasem(mp)
return x
}
//当前mcache上的 tiny 块内存空间不足,分配新的maxTinySize块。就是从sizeclass=2的span.freelist获取一个16字节object。
span := c.alloc[tinySpanClass]
// 尝试从 allocCache 获取内存,获取不到返回0
v := nextFreeFast(span)
if v == 0 {
// 没有从 allocCache 获取到内存,netxtFree函数 尝试从 mcentral获取一个新的对应规格的内存块(新span),替换原先内存空间不足的内存块,并分配内存,后面解析 nextFree 函数
v, _, shouldhelpgc = c.nextFree(tinySpanClass)
}
x = unsafe.Pointer(v)
(*[2]uint64)(x)[0] = 0
(*[2]uint64)(x)[1] = 0
// 对比新旧两个tiny块剩余空间,看看我们是否需要用剩余的自由空间来替换现有的微型块。新块分配后其tinyyoffset = size,因此比对偏移量即可
if size < c.tinyoffset || c.tiny == 0 {
//用新块替换
c.tiny = uintptr(x)
c.tinyoffset = size
}
//消费一个新的完整tiny块
size = maxTinySize
} else {
// 这里开始 正常对象的 内存分配
// 首先查表,以确定 sizeclass
var sizeclass uint8
if size <= smallSizeMax-8 {
sizeclass = size_to_class8[(size+smallSizeDiv-1)/smallSizeDiv]
} else {
sizeclass = size_to_class128[(size-smallSizeMax+largeSizeDiv-1)/largeSizeDiv]
}
size = uintptr(class_to_size[sizeclass])
spc := makeSpanClass(sizeclass, noscan)
//找到对应规格的span.freelist,从中提取object
span := c.alloc[spc]
// 同小对象分配一样,尝试从 allocCache 获取内存,获取不到返回0
v := nextFreeFast(span)
//没有可用的object。从central获取新的span。
if v == 0 {
v, span, shouldhelpgc = c.nextFree(spc)
}
x = unsafe.Pointer(v)
if needzero && span.needzero != 0 {
memclrNoHeapPointers(unsafe.Pointer(v), size)
}
}
} else {
// 这里开始大对象的分配
// 大对象的分配与 小对象 和普通对象 的分配有点不一样,大对象直接从 mheap 上分配
var s *mspan
shouldhelpgc = true
systemstack(func() {
s = largeAlloc(size, needzero, noscan)
})
s.freeindex = 1
s.allocCount = 1
//span.start实际由address >> pageshift生成。
x = unsafe.Pointer(s.base())
size = s.elemsize
}
// bitmap标记...
// 检查出发条件,启动垃圾回收 ...
return x
}
代码基本思路:
1. 判定对象是大对象、小对象还是微小对象。
2. 如果是微小对象:
直接从 mcache 的alloc 找到对应 classsize 的 mspan;
若当前mspan有足够空间,分配并修改mspan的相关属性(nextFreeFast函数中实现);
若当前mspan的空间不足,则从 mcentral重新获取一块 对应 classsize的 mspan,替换原先的mspan,然后分配并修改mspan的相关属性;
对于微小对象,它不能是指针,因为多个微小对象被组合到一个object里,显然无法应对辣鸡扫描。其次它从span.freelist获取一个16字节的object,然后利用偏移量来记录下一次分配的位置。
3. 如果是小对象,内存分配逻辑大致同微小对象:
首先查表,以确定 需要分配内存的对象的 sizeclass,并找到 对应 classsize的 mspan;
若当前mspan有足够的空间,分配并修改mspan的相关属性(nextFreeFast函数中实现);
若当前mspan没有足够的空间,从 mcentral重新获取一块对应 classsize的 mspan,替换原先的mspan,然后分配并修改mspan的相关属性;
4. 如果是大对象,直接从mheap进行分配,这里的实现依靠 largeAlloc 函数实现,再看一下这个函数的实现。还是在malloc.go下面:
func largeAlloc(size uintptr, needzero bool, noscan bool) *mspan {
// print("largeAlloc size=", size, "\n")
// 内存溢出判断
if size+_PageSize < size {
throw("out of memory")
}
// 计算出对象所需的页数
npages := size >> _PageShift
if size&_PageMask != 0 {
npages++
}
// Deduct credit for this span allocation and sweep if
// necessary. mHeap_Alloc will also sweep npages, so this only
// pays the debt down to npage pages.
// 清理(Sweep)垃圾
deductSweepCredit(npages*_PageSize, npages)
// 分配函数的具体实现
s := mheap_.alloc(npages, makeSpanClass(0, noscan), true, needzero)
if s == nil {
throw("out of memory")
}
s.limit = s.base() + size
// bitmap 记录分配的span
heapBitsForAddr(s.base()).initSpan(s)
return s
}
再看看 mheap_.allo()函数的实现:
//mheap.go
// alloc allocates a new span of npage pages from the GC'd heap.
// Either large must be true or spanclass must indicates the span's size class and scannability.
// If needzero is true, the memory for the returned span will be zeroed.
func (h *mheap) alloc(npage uintptr, spanclass spanClass, large bool, needzero bool) *mspan {
// Don't do any operations that lock the heap on the G stack.
// It might trigger stack growth, and the stack growth code needs
// to be able to allocate heap.
//如果needzero为true,则返回范围的内存将为零。
//不要执行任何将堆锁定在G堆栈上的操作。
//它可能会触发堆栈增长,而堆栈增长代码需要能够分配堆。
var s *mspan
systemstack(func() {
s = h.alloc_m(npage, spanclass, large)
})
if s != nil {
if needzero && s.needzero != 0 {
memclrNoHeapPointers(unsafe.Pointer(s.base()), s.npages<<_PageShift)
}
s.needzero = 0
}
return s
}
mheap.alloc_m()根据页数从 heap 上面分配一个新的span,并且在 HeapMap 和 HeapMapCache 上记录对象的sizeclass。
//mheap.go
func (h *mheap) alloc_m(npage uintptr, spanclass spanClass, large bool) *mspan {
_g_ := getg()
if _g_ != _g_.m.g0 {
throw("_mheap_alloc not on g0 stack")
}
lock(&h.lock)
// 清理垃圾,内存块状态标记 省略...
// 从 heap中获取指定页数的span
s := h.allocSpanLocked(npage, &memstats.heap_inuse)
if s != nil {
// Record span info, because gc needs to be
// able to map interior pointer to containing span.
atomic.Store(&s.sweepgen, h.sweepgen)
h.sweepSpans[h.sweepgen/2%2].push(s) // Add to swept in-use list.// 忽略
s.state = _MSpanInUse
s.allocCount = 0
s.spanclass = spanclass
// 重置span的状态
if sizeclass := spanclass.sizeclass(); sizeclass == 0 {
s.elemsize = s.npages << _PageShift
s.divShift = 0
s.divMul = 0
s.divShift2 = 0
s.baseMask = 0
} else {
s.elemsize = uintptr(class_to_size[sizeclass])
m := &class_to_divmagic[sizeclass]
s.divShift = m.shift
s.divMul = m.mul
s.divShift2 = m.shift2
s.baseMask = m.baseMask
}
// update stats, sweep lists
h.pagesInUse += uint64(npage)
if large {
// 更新 mheap中大对象的相关属性
memstats.heap_objects++
mheap_.largealloc += uint64(s.elemsize)
mheap_.nlargealloc++
atomic.Xadd64(&memstats.heap_live, int64(npage<<_PageShift))
// Swept spans are at the end of lists.
// 根据页数判断是busy还是 busylarge链表,并追加到末尾
if s.npages < uintptr(len(h.busy)) {
h.busy[s.npages].insertBack(s)
} else {
h.busylarge.insertBack(s)
}
}
}
// gc trace 标记,省略...
unlock(&h.lock)
return s
}
mheap.allocSpanLocked()函数分配一个给定大小的span,并将分配的span从freelist中移除。
//mheap.go
func (h *mheap) allocSpanLocked(npage uintptr, stat *uint64) *mspan {
var list *mSpanList
var s *mspan
// Try in fixed-size lists up to max.
// 先尝试获取指定页数的span,如果没有,则试试页数更多的
for i := int(npage); i < len(h.free); i++ {
list = &h.free[i]
if !list.isEmpty() {
s = list.first
list.remove(s)
goto HaveSpan
}
}
// Best fit in list of large spans.
// 从 freelarge 上找到一个合适的span节点返回 ,下面继续分析这个函数
s = h.allocLarge(npage) // allocLarge removed s from h.freelarge for us
if s == nil {
// 如果 freelarge上找不到合适的span节点,就只有从 系统 重新分配了
// 后面继续分析这个函数
if !h.grow(npage) {
return nil
}
// 从系统分配后,再次到freelarge 上寻找合适的节点
s = h.allocLarge(npage)
if s == nil {
return nil
}
}
HaveSpan:
// 从 free 上面获取到了 合适页数的span
// Mark span in use. 省略....
if s.npages > npage {
// Trim extra and put it back in the heap.
// 创建一个 s.napges - npage 大小的span,并放回 heap
t := (*mspan)(h.spanalloc.alloc())
t.init(s.base()+npage<<_PageShift, s.npages-npage)
// 更新获取到的span s 的属性
s.npages = npage
h.setSpan(t.base()-1, s)
h.setSpan(t.base(), t)
h.setSpan(t.base()+t.npages*pageSize-1, t)
t.needzero = s.needzero
s.state = _MSpanManual // prevent coalescing with s
t.state = _MSpanManual
h.freeSpanLocked(t, false, false, s.unusedsince)
s.state = _MSpanFree
}
s.unusedsince = 0
// 将s放到spans 和 arenas 数组里面
h.setSpans(s.base(), npage, s)
*stat += uint64(npage << _PageShift)
memstats.heap_idle -= uint64(npage << _PageShift)
//println("spanalloc", hex(s.start<<_PageShift))
if s.inList() {
throw("still in list")
}
return s
}
mheap.allocLarge()函数从 mheap 的 freeLarge 树上面找到一个指定page数量的span,并将该span从树上移除,找不到则返回nil。
//mheap.go
func (h *mheap) allocLarge(npage uintptr) *mspan {
// Search treap for smallest span with >= npage pages.
return h.freelarge.remove(npage)
}
// 上面的 h.freelarge.remove 即调用这个函数
// 典型的二叉树寻找算法
func (root *mTreap) remove(npages uintptr) *mspan {
t := root.treap
for t != nil {
if t.spanKey == nil {
throw("treap node with nil spanKey found")
}
if t.npagesKey < npages {
t = t.right
} else if t.left != nil && t.left.npagesKey >= npages {
t = t.left
} else {
result := t.spanKey
root.removeNode(t)
return result
}
}
return nil
}
mheap.grow()函数在 mheap.allocSpanLocked 这个函数中,如果 freelarge上找不到合适的span节点,就只有从系统重新分配了,那我们接下来就继续分析一下这个函数的实现。
func (h *mheap) grow(npage uintptr) bool {
ask := npage << _PageShift
// 向系统申请内存,后面继续追踪 sysAlloc 这个函数
v, size := h.sysAlloc(ask)
if v == nil {
print("runtime: out of memory: cannot allocate ", ask, "-byte block (", memstats.heap_sys, " in use)\n")
return false
}
// Create a fake "in use" span and free it, so that the
// right coalescing happens.
// 创建 span 来管理刚刚申请的内存
s := (*mspan)(h.spanalloc.alloc())
s.init(uintptr(v), size/pageSize)
h.setSpans(s.base(), s.npages, s)
atomic.Store(&s.sweepgen, h.sweepgen)
s.state = _MSpanInUse
h.pagesInUse += uint64(s.npages)
// 将刚刚申请的span放到 arenas 和 spans 数组里面
h.freeSpanLocked(s, false, true, 0)
return true
}
mheao.sysAlloc()
func (h *mheap) sysAlloc(n uintptr) (v unsafe.Pointer, size uintptr) {
n = round(n, heapArenaBytes)
// First, try the arena pre-reservation.
// 从 arena 中 获取对应大小的内存, 获取不到返回nil
v = h.arena.alloc(n, heapArenaBytes, &memstats.heap_sys)
if v != nil {
// 从arena获取到需要的内存,跳转到 mapped操作
size = n
goto mapped
}
// Try to grow the heap at a hint address.
// 尝试 从 arenaHint向下扩展内存
for h.arenaHints != nil {
hint := h.arenaHints
p := hint.addr
if hint.down {
p -= n
}
if p+n < p {
// We can't use this, so don't ask.
// 表名 hint.down = false 不能向下扩展内存
v = nil
} else if arenaIndex(p+n-1) >= 1<<arenaBits {
// 超出 heap 可寻址的内存地址,不能使用
// Outside addressable heap. Can't use.
v = nil
} else {
// 当前hint可以向下扩展内存,利用mmap向系统申请内存
v = sysReserve(unsafe.Pointer(p), n)
}
if p == uintptr(v) {
// Success. Update the hint.
if !hint.down {
p += n
}
hint.addr = p
size = n
break
}
// Failed. Discard this hint and try the next.
//
// TODO: This would be cleaner if sysReserve could be
// told to only return the requested address. In
// particular, this is already how Windows behaves, so
// it would simply things there.
if v != nil {
sysFree(v, n, nil)
}
h.arenaHints = hint.next
h.arenaHintAlloc.free(unsafe.Pointer(hint))
}
if size == 0 {
if raceenabled {
// The race detector assumes the heap lives in
// [0x00c000000000, 0x00e000000000), but we
// just ran out of hints in this region. Give
// a nice failure.
throw("too many address space collisions for -race mode")
}
// All of the hints failed, so we'll take any
// (sufficiently aligned) address the kernel will give
// us.
v, size = sysReserveAligned(nil, n, heapArenaBytes)
if v == nil {
return nil, 0
}
// Create new hints for extending this region.
hint := (*arenaHint)(h.arenaHintAlloc.alloc())
hint.addr, hint.down = uintptr(v), true
hint.next, mheap_.arenaHints = mheap_.arenaHints, hint
hint = (*arenaHint)(h.arenaHintAlloc.alloc())
hint.addr = uintptr(v) + size
hint.next, mheap_.arenaHints = mheap_.arenaHints, hint
}
// Check for bad pointers or pointers we can't use.
{
var bad string
p := uintptr(v)
if p+size < p {
bad = "region exceeds uintptr range"
} else if arenaIndex(p) >= 1<<arenaBits {
bad = "base outside usable address space"
} else if arenaIndex(p+size-1) >= 1<<arenaBits {
bad = "end outside usable address space"
}
if bad != "" {
// This should be impossible on most architectures,
// but it would be really confusing to debug.
print("runtime: memory allocated by OS [", hex(p), ", ", hex(p+size), ") not in usable address space: ", bad, "\n")
throw("memory reservation exceeds address space limit")
}
}
if uintptr(v)&(heapArenaBytes-1) != 0 {
throw("misrounded allocation in sysAlloc")
}
// Back the reservation.
sysMap(v, size, &memstats.heap_sys)
mapped:
// Create arena metadata.
// 根据 v 的address,计算出 arenas 的L1 L2
for ri := arenaIndex(uintptr(v)); ri <= arenaIndex(uintptr(v)+size-1); ri++ {
l2 := h.arenas[ri.l1()]
if l2 == nil {
// 如果 L2 为 nil,则分配 arenas[L1]
// Allocate an L2 arena map.
l2 = (*[1 << arenaL2Bits]*heapArena)(persistentalloc(unsafe.Sizeof(*l2), sys.PtrSize, nil))
if l2 == nil {
throw("out of memory allocating heap arena map")
}
atomic.StorepNoWB(unsafe.Pointer(&h.arenas[ri.l1()]), unsafe.Pointer(l2))
}
// 如果 arenas[ri.L1()][ri.L2()] 不为空 说明已经实例化过了
if l2[ri.l2()] != nil {
throw("arena already initialized")
}
var r *heapArena
// 从 arena 上分配内存
r = (*heapArena)(h.heapArenaAlloc.alloc(unsafe.Sizeof(*r), sys.PtrSize, &memstats.gc_sys))
if r == nil {
r = (*heapArena)(persistentalloc(unsafe.Sizeof(*r), sys.PtrSize, &memstats.gc_sys))
if r == nil {
throw("out of memory allocating heap arena metadata")
}
}
// Store atomically just in case an object from the
// new heap arena becomes visible before the heap lock
// is released (which shouldn't happen, but there's
// little downside to this).
atomic.StorepNoWB(unsafe.Pointer(&l2[ri.l2()]), unsafe.Pointer(r))
}
// ...
return
}
大对象的分配流程至此结束。
3.2 小对象和微小对象的分配
nextFreeFast()函数返回 span 上可用的地址,如果找不到 则返回0
func nextFreeFast(s *mspan) gclinkptr {
// 计算s.allocCache从低位起有多少个0
theBit := sys.Ctz64(s.allocCache) // Is there a free object in the allocCache?
if theBit < 64 {
result := s.freeindex + uintptr(theBit)
if result < s.nelems {
freeidx := result + 1
if freeidx%64 == 0 && freeidx != s.nelems {
return 0
}
// 更新bitmap、可用的 slot索引
s.allocCache >>= uint(theBit + 1)
s.freeindex = freeidx
s.allocCount++
// 返回 找到的内存的地址
return gclinkptr(result*s.elemsize + s.base())
}
}
return 0
}
mcache.nextFree()函数。如果 nextFreeFast 找不到 合适的内存,就会进入这个函数。nextFree 如果在cached span 里面找到未使用的object,则返回,否则,调用refill 函数,从 central 中获取对应classsize的span,然后 从新的span里面找到未使用的object返回。
//mcache.go
func (c *mcache) nextFree(spc spanClass) (v gclinkptr, s *mspan, shouldhelpgc bool) {
// 先找到 mcache 中 对应 规格的 span
s = c.alloc[spc]
shouldhelpgc = false
// 在 当前span中找到合适的 index索引
freeIndex := s.nextFreeIndex()
if freeIndex == s.nelems {
// The span is full.
// freeIndex == nelems 时,表示当前span已满
if uintptr(s.allocCount) != s.nelems {
println("runtime: s.allocCount=", s.allocCount, "s.nelems=", s.nelems)
throw("s.allocCount != s.nelems && freeIndex == s.nelems")
}
// 调用refill函数,从 mcentral 中获取可用的span,并替换掉当前 mcache里面的span
systemstack(func() {
c.refill(spc)
})
shouldhelpgc = true
s = c.alloc[spc]
// 再次到新的span里面查找合适的index
freeIndex = s.nextFreeIndex()
}
if freeIndex >= s.nelems {
throw("freeIndex is not valid")
}
// 计算出来 内存地址,并更新span的属性
v = gclinkptr(freeIndex*s.elemsize + s.base())
s.allocCount++
if uintptr(s.allocCount) > s.nelems {
println("s.allocCount=", s.allocCount, "s.nelems=", s.nelems)
throw("s.allocCount > s.nelems")
}
return
}
mcache.refill()函数
Refill 根据指定的sizeclass获取对应的span,并作为 mcache的新的sizeclass对应的span
//mcache.go
func (c *mcache) refill(spc spanClass) {
_g_ := getg()
_g_.m.locks++
// Return the current cached span to the central lists.
s := c.alloc[spc]
if uintptr(s.allocCount) != s.nelems {
throw("refill of span with free space remaining")
}
// 判断s是不是 空的span
if s != &emptymspan {
s.incache = false
}
// 尝试从 mcentral 获取一个新的span来代替老的span
// Get a new cached span from the central lists.
s = mheap_.central[spc].mcentral.cacheSpan()
if s == nil {
throw("out of memory")
}
if uintptr(s.allocCount) == s.nelems {
throw("span has no free space")
}
// 更新mcache的span
c.alloc[spc] = s
_g_.m.locks--
}
如果 从 mcentral 找不到对应的span,就会开始内存扩张,和上面分析的 mheap.alloc就相同了
4. 总结
-
判定对象大小:
-
若是微小对象:
- 从 mcache 的 alloc 找到对应 classsize 的 mspan;
- 当前mspan有足够的空间时,分配并修改mspan的相关属性(nextFreeFast函数中实现);
- 若当前mspan没有足够的空间,从 mcentral 重新获取一块对应 classsize的 mspan,替换原先的mspan,然后分配并修改mspan的相关属性;
- 若 mcentral 没有足够的对应的classsize的span,则去向mheap申请;
- 若对应classsize的span没有了,则找一个相近的classsize的span,切割并分配;
- 若找不到相近的classsize的span,则去向系统申请,并补充到mheap中;
-
若是小对象,内存分配逻辑大致同小对象:
- 查表以确定需要分配内存的对象的 sizeclass,找到 对应classsize的 mspan;
- mspan有足够的空间时,分配并修改mspan的相关属性(nextFreeFast函数中实现);
- 若当前mspan没有足够的空间,从 mcentral重新获取一块对应 classsize的 mspan,替换原先的mspan,然后分配并修改mspan的相关属性;
- 若mcentral没有足够的对应的classsize的span,则去向mheap申请;
- 若对应classsize的span没有了,则找一个相近的classsize的span,切割并分配
- 若找不到相近的classsize的span,则去向系统申请,并补充到mheap中
-
若是大对象,直接从mheap进行分配
- 若对应classsize的span没有了,则找一个相近的classsize的span,切割并分配;
- 若找不到相近的classsize的span,则去向系统申请,并补充到mheap中;